Product Description
High Torque Output Motor robot joint actuator motor 200W collaborative robot arm
Product Description
OD 80mm Small size robot joint actuator servo motor is mainly used for Robot Arm, integrated harmonic reducer, encoder, dc motor and driver. The robot joint servo motor could be used in robot arm joint directly, help build robot joints quickly.
Product Features
1. Isolate CANopen communication according to CiA301 V4.2.0 specification
A. Support SDO, TPDO, RPDO.
B. Support speed mode, position mode (contour mode, interpolation mode)
C. Support heartbeat production and consumption
2. 15 bit absolute encoder, 1 lap pulse up to 32768.
3. Multi-stage DD motor structure, large torque output.
4. Harmonic reducer, motor, driver and encoder are integrated.
5. Low noise, low vibration, high speed positioning, high reliability.
6. FOC field oriented vector control, support position / speed closed loop.
7. Can work at zero hysteresis given pulse state, following zero hysteresis.
8. 16-bit electronic gear features.
9. CANopen upper computer is provided, which can monitor motor state and modify parameters.
10. Position mode, support pulse + direction signal, encoder to follow.
11. Speed mode, support PWM duty cycle signal speed regulation
12. It has the function of blocking rotation, over current protection and over voltage protection.
13. Absolute value of low power consumption and multi-turn
A. All-in-1 servo 485/CAN communication version can add multi-turn function.
B. When the motor is powered, there is a charging circuit inside to charge the battery. When the motor is powered off, the battery current consumption is only 0.07mA.
C. After the motor has no power supply, the motor shaft is driven to rotate to wake up the encoder and continue to memorize the position.
D. Multi-turn memory range -60000 ~ 60000 laps.
E. Simple setting of the origin, it can be set as the CZPT at any position.
F. Multiple zero return methods: communication zero return, automatic zero return on power-on, and zero point signal output.
G. Error protection: battery power failure alarm.
Highly integrated 17 model harmonic reducer, 100W 1500RPM DC motor, Motor driver and 15-bit single turn absolute value encoder+9-bit multi-turn absolute value encoder
Support SDO TPDO RPDO
Provide CANopen host computer software which can monitor motor status and modify parameters
Position mode, support Pulse + Direction signal, encoder follow(m5730 ROBOT JOINT ACTUATOR)
Speed mode, support PWM duty cycle signal speed regulation
The speed is controlled by the duty cycle of the pulse to the PU. The duty cycle speed range of 10%~90% represents 0~Max_Speed (Max_Speed is the target speed of the position mode protection. By setting this parameter, the required speed can be controlled more accurately. , Don’t worry about exceeding the set speed). The frequency for PU is 1K~10K.
PU duty cycle=(target speed/3000)*80%+10%
For example: Need to rotate speed 2000
PU duty cycle=(2000/3000)*0.8+0.1=63.3%
Isolated CANopen communication, built-in isolated power supply, low power consumption multi-turn absolute value, built-in battery, automatic charging.
Product Parameters
Parameter of M85710 Series Robot Joint Motor Actuator
| Model | Parameter | M8571E25B50L | M8571E25B80L | M8571E25B100L |
| Overall parameter | Motor rated voltage | 36VDC±10% | 36VDC±10% | 36VDC±10% |
| Motor rated current | 7A | 7A | 7A | |
| Output torque after deceleration | 51NM | 85NM | 100NM | |
| Weight | 2.5KG | 2.5KG | 2.5KG | |
| Speed range after deceleration | 0~30RPM | 0~18RPM | 0~10RPM | |
| Reducer parameter | Reduction ratio | 50 | 80 | 100 |
| Rated torque | 51NM | 82NM | 87NM | |
| Peak start-stop torque | 127NM | 178NM | 204NM | |
| Allowable maximum value of average load torque | 72NM | 113NM | 140NM | |
| Momentary allowable maximum torque | 242NM | 332NM | 369NM | |
| Backlash | <20 arc seconds | <20 arc seconds | <20 arc seconds | |
| Design life | 8500hour | 8500hour | 8500hour | |
| Motor parameter | Torque | 2NM | 2NM | 2NM |
| Rated speed | 1000RPM | 1000RPM | 1000RPM | |
| Maximum rotational speed | 1500RPM | 1500RPM | 1500RPM | |
| Power | 200W | 200W | 200W | |
| Resistance | 0.53 | 0.53 | 0.53 | |
| Inductance | 0.5mh | 0.5mh | 0.5mh | |
| Rotary inertia | 1.74×10-4 KG/M2 | 1.74×10-4 KG/M2 | 1.74×10-4 KG/M2 | |
| Feedback signal | Multi-loop absolute encoder (single-loop 15 bit multi-loop 9 bit) | |||
| Cooling mode | Natural cooling | |||
| Position Control Mode | Maximum input pulse frequency | 500KHz | ||
| Pulse instruction mode | Pulse + direction, A phase +B phase | |||
| Electronic gear ratio | Set up 1~65535 to 1~ 65535 | |||
| Location sampling frequency | 2KHz | |||
| Protection function | Clogged rotation alarm, over current alarm | |||
| Communication interface | Easycan (CAN communication, rate 1 M) | |||
| Environment | Ambient temperature | 0~40° | ||
| Max. permissible temperature of motor | 85° | |||
| Humidity | 5~95% | |||
Application
With modular design, compact joint module, its weight, size, installation mode, appearance lamp compared with the traditional products have done a considerable optimization, mainly used in cooperative robotand and light robot, can meet the miniaturization, lightweight, modular needs to a large extent.Can also be widely used in industrial robots, service robots, industrial automation equipment, lathe equipment and etc.
After Sales Service
1. We accept small order of robot joint modules;
2. Sample order of robot joint modules delivery time is in 10 days, mass quantity order lead time is 7-15 days;
3. We can accept payment via paypal, T/T and L/C;
4.Quality assurance of our robot joint modules is 1 year, and we can provide you professional technical support;
5. We provide free software wand training how to use the robot joint modules. Engineers are available for technical support.
FAQ
Q: Are you trading company or manufacturer?
A: We are manufacturer and trading company.
Q: Can I have a sample order?
A: Yes, we welcome sample order to test and check quality.
Q: How long is your delivery time?
A: Due to the complex process, production takes 8-10 working days. For customized goods, please check with us before order.
Q. How do you ship the goods and how long does it take to arrive?
A: Usually by express, like DHL, UPS, FedEx, EMS or TNT; By air and sea are also available.
Express takes 3-15 days to arrive.
Q: What is your terms of payment?
A: We accept Trade Assurance Order, TT, Paypal, West Union and L/C.
|
Shipping Cost:
Estimated freight per unit. |
To be negotiated |
|---|
| After-sales Service: | Professional After-Sales Service |
|---|---|
| Warranty: | 1 Year |
| Muscle Size: | <2kg |
| Samples: |
US$ 462/Piece
1 Piece(Min.Order) | Order Sample |
|---|

The Parts of a Gearbox
There are many parts of a Gearbox, and this article will help you understand its functions and components. Learn about its maintenance and proper care, and you’ll be on your way to repairing your car. The complexity of a Gearbox also makes it easy to make mistakes. Learn about its functions and components so that you’ll be able to make the best choices possible. Read on to learn more. Then, get your car ready for winter!
Components
Gearboxes are fully integrated mechanical components that consist of a series of gears. They also contain shafts, bearings, and a flange to mount a motor. The terms gearhead and gearbox are not often used interchangeably in the motion industry, but they are often synonymous. Gearheads are open gearing assemblies that are installed in a machine frame. Some newer designs, such as battery-powered mobile units, require tighter integration.
The power losses in a gearbox can be divided into no-load and load-dependent losses. The no-load losses originate in the gear pair and the bearings and are proportional to the ratio of shaft speed and torque. The latter is a function of the coefficient of friction and speed. The no-load losses are the most serious, since they represent the largest proportion of the total loss. This is because they increase with speed.
Temperature measurement is another important preventive maintenance practice. The heat generated by the gearbox can damage components. High-temperature oil degrades quickly at high temperatures, which is why the sump oil temperature should be monitored periodically. The maximum temperature for R&O mineral oils is 93degC. However, if the sump oil temperature is more than 200degF, it can cause seal damage, gear and bearing wear, and premature failure of the gearbox.
Regardless of its size, the gearbox is a crucial part of a car’s drivetrain. Whether the car is a sports car, a luxury car, or a farm tractor, the gearbox is an essential component of the vehicle. There are two main types of gearbox: standard and precision. Each has its own advantages and disadvantages. The most important consideration when selecting a gearbox is the torque output.
The main shaft and the clutch shaft are the two major components of a gearbox. The main shaft runs at engine speed and the countershaft may be at a lower speed. In addition to the main shaft, the clutch shaft has a bearing. The gear ratio determines the amount of torque that can be transferred between the countershaft and the main shaft. The drive shaft also has another name: the propeller shaft.
The gears, shafts, and hub/shaft connection are designed according to endurance design standards. Depending on the application, each component must be able to withstand the normal stresses that the system will experience. Oftentimes, the minimum speed range is ten to twenty m/s. However, this range can differ between different transmissions. Generally, the gears and shafts in a gearbox should have an endurance limit that is less than that limit.
The bearings in a gearbox are considered wear parts. While they should be replaced when they wear down, they can be kept in service much longer than their intended L10 life. Using predictive maintenance, manufacturers can determine when to replace the bearing before it damages the gears and other components. For a gearbox to function properly, it must have all the components listed above. And the clutch, which enables the transmission of torque, is considered the most important component.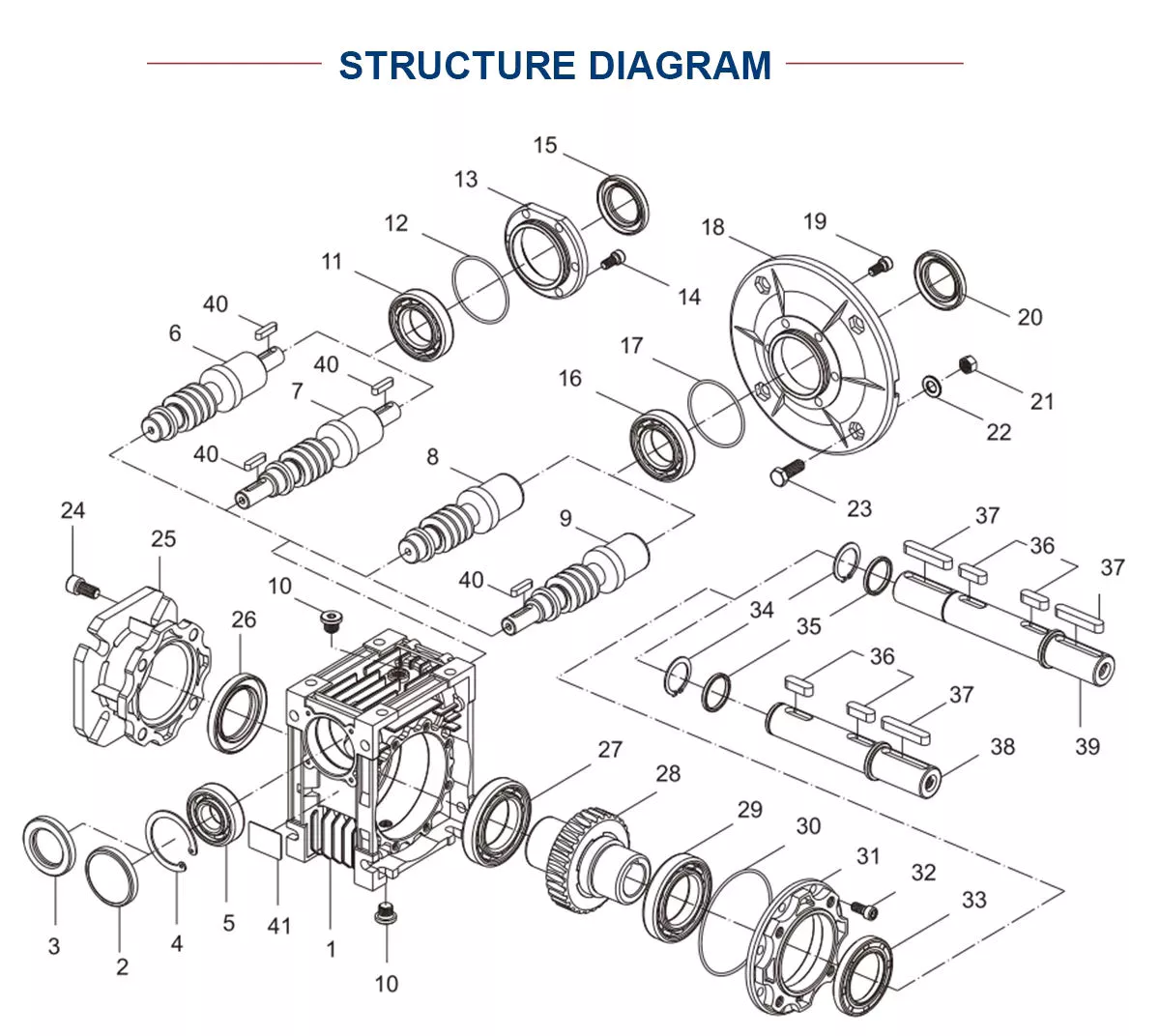
Functions
A gearbox is a fully integrated mechanical component that consists of mating gears. It is enclosed in a housing that houses the shafts, bearings, and flange for motor mounting. The purpose of a gearbox is to increase torque and change the speed of an engine by connecting the two rotating shafts together. A gearbox is generally made up of multiple gears that are linked together using couplings, belts, chains, or hollow shaft connections. When power and torque are held constant, speed and torque are inversely proportional. The speed of a gearbox is determined by the ratio of the gears that are engaged to transmit power.
The gear ratios in a gearbox are the number of steps a motor can take to convert torque into horsepower. The amount of torque required at the wheels depends on the operating conditions. A vehicle needs more torque than its peak torque when it is moving from a standstill. Therefore, the first gear ratio is used to increase torque and move the vehicle forward. To move up a gradient, more torque is required. To maintain momentum, the intermediate gear ratio is used.
As metal-to-metal contact is a common cause of gearbox failure, it is essential to monitor the condition of these components closely. The main focus of the proactive series of tests is abnormal wear and contamination, while the preventative tests focus on oil condition and additive depletion. The AN and ferrous density tests are exceptions to this rule, but they are used more for detecting abnormal additive depletion. In addition, lubrication is critical to the efficiency of gearboxes.
Maintenance
Daily maintenance is a critical aspect of the life cycle of a gearbox. During maintenance, you must inspect all gearbox connection parts. Any loose or damaged connection part should be tightened immediately. Oil can be tested using an infrared thermometer and particle counters, spectrometric analysis, or ferrography. You should check for excessive wear and tear, cracks, and oil leaks. If any of these components fail, you should replace them as soon as possible.
Proper analysis of failure patterns is a necessary part of any preventative maintenance program. This analysis will help identify the root cause of gearbox failures, as well as plan for future preventative maintenance. By properly planning preventative maintenance, you can avoid the expense and inconvenience of repairing or replacing a gearbox prematurely. You can even outsource gearbox maintenance to a company whose experts are knowledgeable in this field. The results of the analysis will help you create a more effective preventative maintenance program.
It is important to check the condition of the gearbox oil periodically. The oil should be changed according to its temperature and the hours of operation. The temperature is a significant determinant of the frequency of oil changes. Higher temperatures require more frequent changes, and the level of protection from moisture and water reduces by 75%. At elevated temperatures, the oil’s molecular structure breaks down more quickly, inhibiting the formation of a protective film.
Fortunately, the gear industry has developed innovative technologies and services that can help plant operators reduce their downtime and ensure optimal performance from their industrial gears. Here are 10 steps to ensure that your gearbox continues to serve its purpose. When you are preparing for maintenance, always keep in mind the following tips:
Regular vibration analysis is a vital part of gearbox maintenance. Increased vibration signals impending problems. Visually inspect the internal gears for signs of spiraling and pitting. You can use engineers’ blue to check the contact pattern of gear teeth. If there is a misalignment, bearings or housings are worn and need replacement. Also make sure the breathers remain clean. In dirty applications, this is more difficult to do.
Proper lubrication is another key factor in the life of gearboxes. Proper lubrication prevents failure. The oil must be free of foreign materials and have the proper amount of flow. Proper lubricant selection depends on the type of gear, reduction ratio, and input power. In addition to oil level, the lubricant must be regulated for the size and shape of gears. If not, the lubricant should be changed.
Lack of proper lubrication reduces the strength of other gears. Improper maintenance reduces the life of the transmission. Whether the transmission is overloaded or undersized, excessive vibration can damage the gear. If it is not properly lubricated, it can be damaged beyond repair. Then, the need for replacement gears may arise. However, it is not a time to waste a lot of money and time on repairs.


editor by CX 2023-06-02